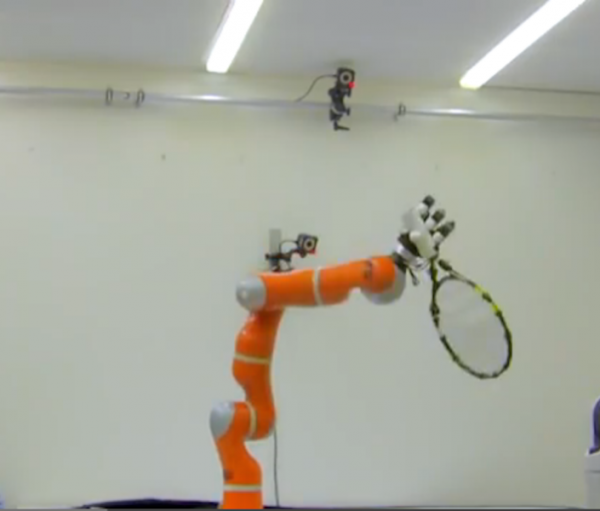
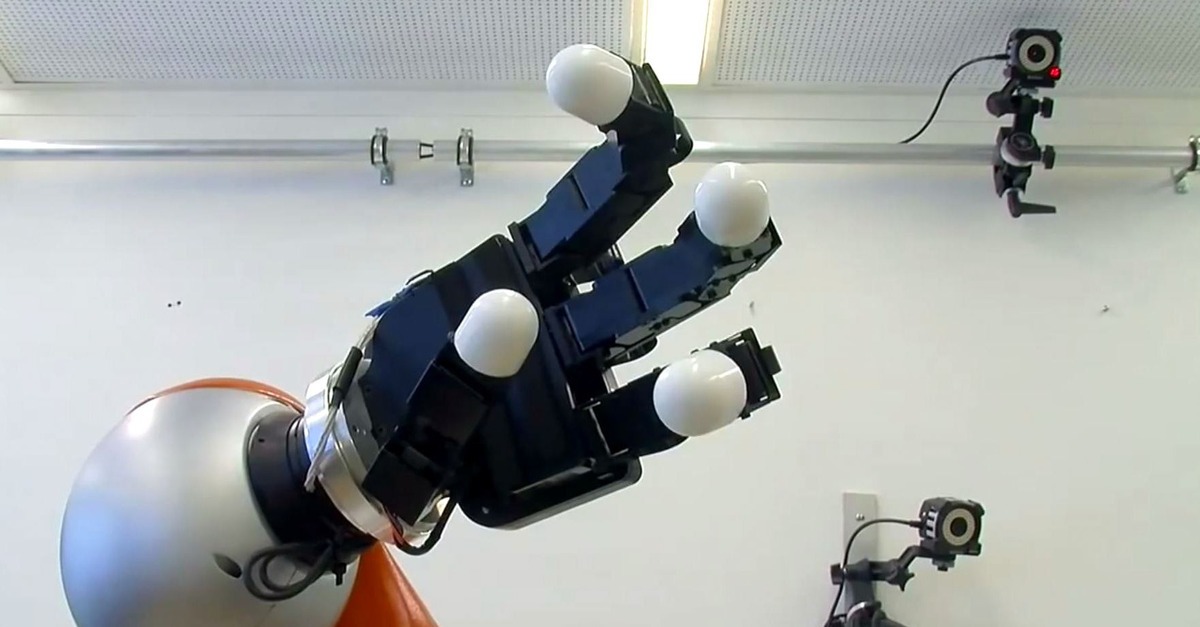
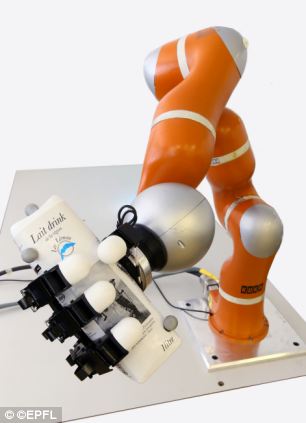
Newly developed robotic arm can catch complex shaped objects thrown towards it. It can be used to make robots to play tennis, baseball or installed on the satellites to catch the flying debris. This robotic arm has been designed and developed by the Scientists at Ecole Polytechnique Fédérale de Lausanne. It has the ability to catch and hold the complex shaped objects. The reaction time to catch an object thrown towards is extraordinarily low as 0.002seconds. The newly developed robot can catch almost everything even a bottle. A research paper about this innovative robotic arm design has been recently published in “IEEE transaction on Robotics”. The robotic arm has a length of 1.5m with a cute hand of four fingers. The arm has 3 joints to be able to move smoothly.
[youtube]http://www.youtube.com/watch?v=M413lLWvrbI[/youtube]
Aude Billard who is heading the research project says, “‘increasingly present in our daily lives and used to perform various tasks, robots will be able to either catch or dodge complex objects in full-motion.” He further added, “Not only do we need machines able to react on the spot, but also to predict the moving object’s dynamics and generate a movement in the opposite direction.” The ability of the robotic arm to hold even irregular shaped objects in such a small amount of time is really astonishing. No doubt, its use in various fields is unavoidable.

The researchers see its use even in space as it is made a part of clean-mE project being carried out by Swiss Space Center. The aim of the project is to make the orbits above the earth more clean and dispose-off the remains of out-of-service satellites orbiting earth. The arm will be fitted on the satellite catching the debris flying around. However, the robot can’t catch the debris or objects whose dynamics are unknown to it. To attain the precision and speed of the robotic arm, the researchers got inspirations from human arm. The technique developed is named as “Programming by Demonstration.”
First of all the robotic arm was trained by throwing a number of times the objects like a hammer, a half filled bottle, an empty bottle, a ball and a tennis racket towards it. All these shapes have different shapes and sizes, the purpose was to train the robot to catch all these different shaped objects with different center of gravities. The case of the bottle is specially interesting to handle as during the flight its center of gravity keeps on changing its position. The robot with a series of cameras around it models the flight of these objects into an equation which is subsequently used to calculate and predict the trajectory of these objects and catch them.